Sortie du manuel Python n°3 pour le collège : le transporteur
L’heure de la rentrée a sonné ! Nous profitons de cette occasion pour sortir notre 3e manuel d’apprentissage du langage Python pour le collège. Tout comme le précédent, il s’agit d’un manuel de programmation appliquée qui propose de s’exercer et de manipuler toutes les notions acquises jusque-là sur la programmation en langage Python. Pour ce faire, les élèves sont invités à élaborer un nouveau robot inspiré cette fois-ci des véhicules utilisés dans les usines : le transporteur.
 |
Consulter le manuel Python n°3 : Programmation appliquée (collège) Caractéristiques du manuel :
|

Progression didactique du manuel Python n°3 pour le collège
Beaucoup plus concis que le manuel de programmation appliquée précédent, le manuel Python n°3 n’introduit pas de nouvelle notion majeure, mais est davantage un cahier d’exercices. Ce cahier d’apprentissage du Python ne propose cependant pas plusieurs petits exercices, mais un exercice long présenté sous la forme d’une mission pour lequel les élèves seront amenés à réutiliser bon nombre des notions de programmation vues jusque-là.
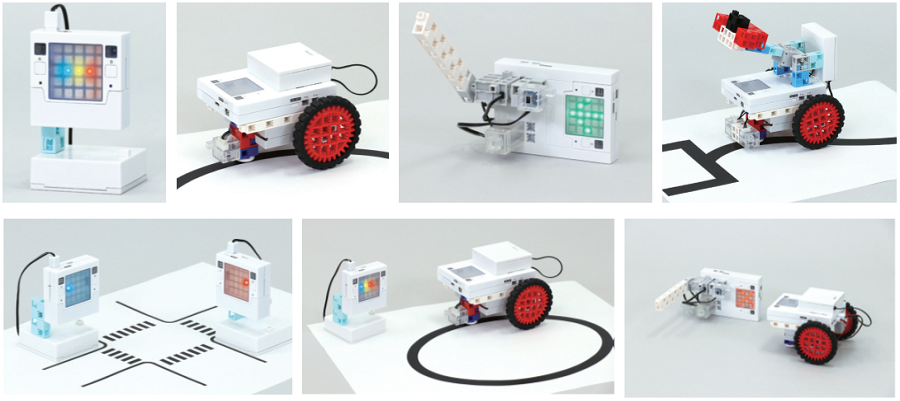
Prérequis : Pour réaliser cet exercice de programmation, il est nécessaire d’avoir acquis les compétences enseignées dans les manuels n°1 et n°2, notamment pour maîtriser la programmation des moteurs, du servomoteur et des photoréflecteurs IR. Les collégiens auront alors toutes les cartes en main pour accomplir la mission qui leur est confiée : programmer un transporteur tout droit inspiré d’un robot d’usine, le véhicule à guidage automatique.
Composition du cahier d’exercices de programmation en Python
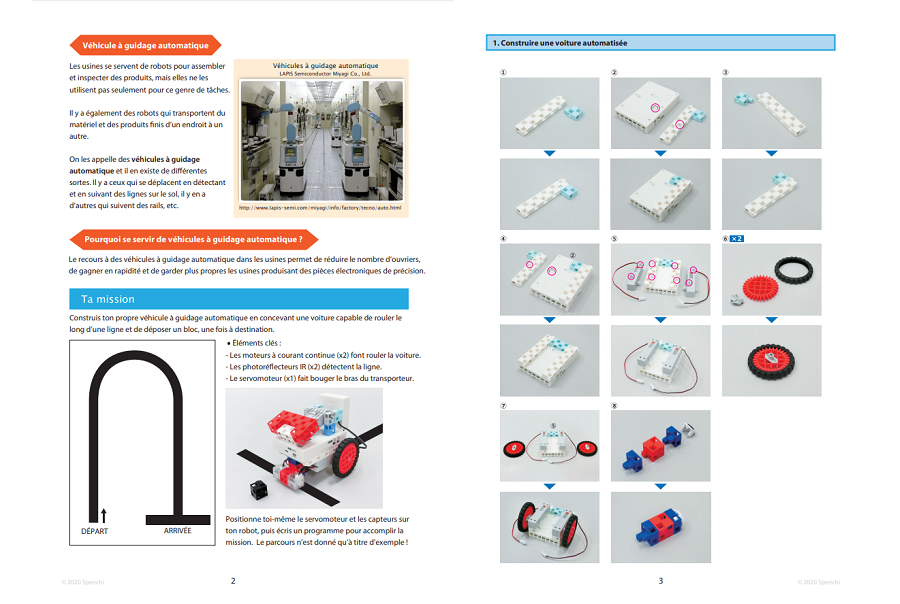
- Fiche de présentation de la mission et mise en contexte du robot
- Guide de construction du robot en pas-à-pas
- Consignes : les grandes lignes directrices décrivant le comportement attendu du robot
- Mini fiche pour introduire une nouvelle notion : les opérateurs booléens
- Fiche de solution du professeur
Les étapes de la mission
-
- Programmer le transporteur à rouler le long d’une ligne noire : Les élèves devront d’abord faire rouler leur véhicule le long d’une ligne noire. Pour ce faire, ils devront réutiliser les notions vues dans le manuel n°1 “Les bases de la programmation” dans le chapitre portant sur la voiture de circuit.
- Programmer le transporteur à s’arrêter quand il détecte une ligne noire horizontale : Ils devront ensuite programmer les moteurs de leur transporteur à s’arrêter dès que ses photoréflecteurs infrarouges détectent en même temps une ligne noire.
- Programmer le transporter à déposer le bloc qu’il transporte une fois arrivé : Enfin, ils devront réutiliser ce qu’ils ont appris sur le servomoteur dans la leçon portant sur la barrière automatique pour programmer le bras de leur transporteur à déposer le cube au point d”arrivée.
Besoin de plus d’infos ?
Pour en savoir plus sur l’esprit et la structure du cursus de programmation pour le collège, nous vous invitons à consulter l’article “Le nouveau cursus de programmation Python pour le collège : les grandes lignes“.
The post Sortie du manuel Python n°3 pour le collège : le transporteur appeared first on Speechi.
Sortie du manuel Python n°3 pour le collège : le transporteur
L’heure de la rentrée a sonné ! Nous profitons de cette occasion pour sortir notre 3e manuel d’apprentissage du langage…

